Note
L’insieme di relazioni formali che esprimono, quantitativamente e qualitativamente, come le uscite sono influenzate dagli ingressi è detto modello del sistema.
Memoria di un computer
Siano:
- : Dati in ram.
- : Dati allocati all’istante .
- : Dati deallocati all’istante in ram.
- : Dati sul disco.
- : Dati deallocati all’istante sul disco.
- : Dati spostati dalla memoria fisica alla memoria ram, manipolabile.
Possiamo definire l’equazione:
Questa, siccome il tempo è discreto, è detta equazione alle differenze, e in forma matriciale è:
Stato dei modelli
Note
Lo stato è una variabile, la cui conoscenza all’istante iniziale è necessaria per caratterizzare l’andamento delle variabili del sistema a fronte di un ingresso dato.
Le variabili di stato sono poste nel vettore , inoltre è detto ordine del sistema.
La forma dell’equazione di stato è:
La generica funzione dipende da se esistono parametri variabili nel tempo. La forma dell’equazione di uscita è invece:
Definendo una condizione iniziale e , è possibile simulare il sistema. Chiamiamo movimento dello stato, e movimento dell’uscita.
Equilibrio
Definiamo il movimento di equilibrio, per sistemi tempo-invarianti, come segue.
Dato un ingresso costante , per modelli a tempo continuo, l’equilibrio è definito come:
Le soluzioni di questa equazione hanno cardinalità qualsiasi (Si possono avere dalla nessuna soluzione alle infinite soluzioni). Per i modelli a tempo discreto invece si ha:
Se allora , altrimenti se allora non esiste equilibrio. In caso di equilibrio questo è verificato se:
Classificazione dei modelli
Note
I modelli, secondo diversi criteri, possono essere:
- Tempo discreto se , Tempo continuo se .
- Ordine del modello: numero di variabili di stato .
- Strettamente proprio se , Proprio non strettamente altrimenti.
- Tempo invariante se e , Tempo variante altrimenti.
- Lineare se e , con , e , e di conseguenza , , e , Non lineare altrimenti.
- Dinamico se ha variabili di stato, Statico altrimenti.
- SISO (Single Input - Single Output) se , MIMO (Multiple Input - Multiple Output) altrimenti.
Stabilità di un modello
Note
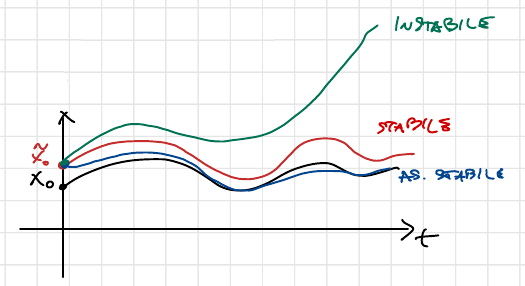
Definiamo il movimento in esame :
Definiamo adesso un movimento perturbato, cioè il movimento definito con:
Formalmente diciamo che, è stabile se:
Altrimenti è instabile. Inoltre diciamo che è asintoticamente stabile se è stabile e:
Se l’intorno è allora si parla di stabilità asintotica globale, altrimenti si parla di stabilità asintotica locale.